THIS WEBSITE USES COOKIES
We use cookies to personalise content, to provide social media features, and to analyse our traffic. By choosing 'allow all cookies', you consent to our cookies.
To find out more, read our privacy policy and cookie policy.
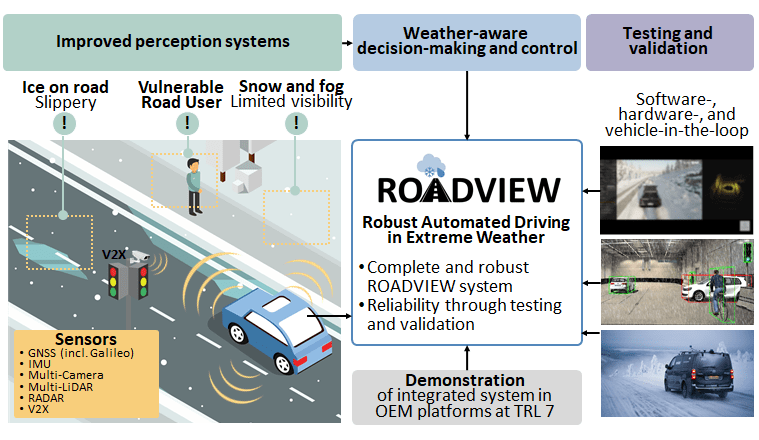
ROADVIEW consists of various perception and decision-making modules to achieve a Technology Readiness Level 7 automated driving stack capable of running under extreme weather conditions.
Perception systems
ROADVIEW will deliver more powerful and reliable in-vehicle perception systems, with improved resilience and accuracy under harsh weather conditions.
Improved sensor and noise models
Using noise filtering to improve detection of objects and vulnerable road users
Enhanced sensing by using additional sensors, such as thermal camera and imaging RADAR
Using adaptive sensor fusion and collaborative infrastructure-based perception for improving object and drivable area (free space) detection
Improved localisation and use of HD map technology
Testing and validation
ROADVIEW will develop novel noise models and integrate them into the different test systems. For their operation, we will achieve modularity in an X-in-the-loop test environment in which different sensor models can be integrated to generate synthetic sensor data and test sensor hardware. Furthermore, standard interfaces (e.g., OSI) will enable a gradual migration from sensor to vehicle-in-the-loop testing without any modification of the system-under-test.
Data annotation
ROADVIEW leverages advanced technologies and methodologies to develop robust automated driving systems. Data labeling of Lidar, Radar, and RGB images for training our machine learning models is conducted on the Segments.ai multi-sensor labeling platform. This ensures high-quality, precise annotations that enhance the performance of our perception and decision-making modules under extreme weather conditions.